Позвоните в службу поддержки
+86-795-3241001

2025-10-20
Датчик Холла — это магнитный датчик, работающий на эффекте Холла, который может преобразовывать изменяющееся магнитное поле в изменения выходного напряжения.
Когда проводник или полупроводник с током находится в магнитном поле, перпендикулярном току, на его концах возникает разность потенциалов, перпендикулярная как току, так и магнитному полю. Это явление называется эффектом Холла, а возникающая при этом электродвижущая сила – электродвижущей силой Холла. Электродвижущая сила Холла линейно связана с напряжённостью магнитной индукции, поэтому её можно измерить. В этом и заключается принцип работы датчика Холла.

Микросхемы датчиков Холла в своей основе используют физический принцип — эффект Холла: при прохождении тока через полупроводник (элемент Холла) перпендикулярно внешнему магнитному полю, носители заряда (электроны или дырки) в полупроводнике отклоняются под действием силы Лоренца, образуя разность потенциалов в направлении, перпендикулярном току и магнитному полю. Эта разность потенциалов называется датчиком напряжения Холла.
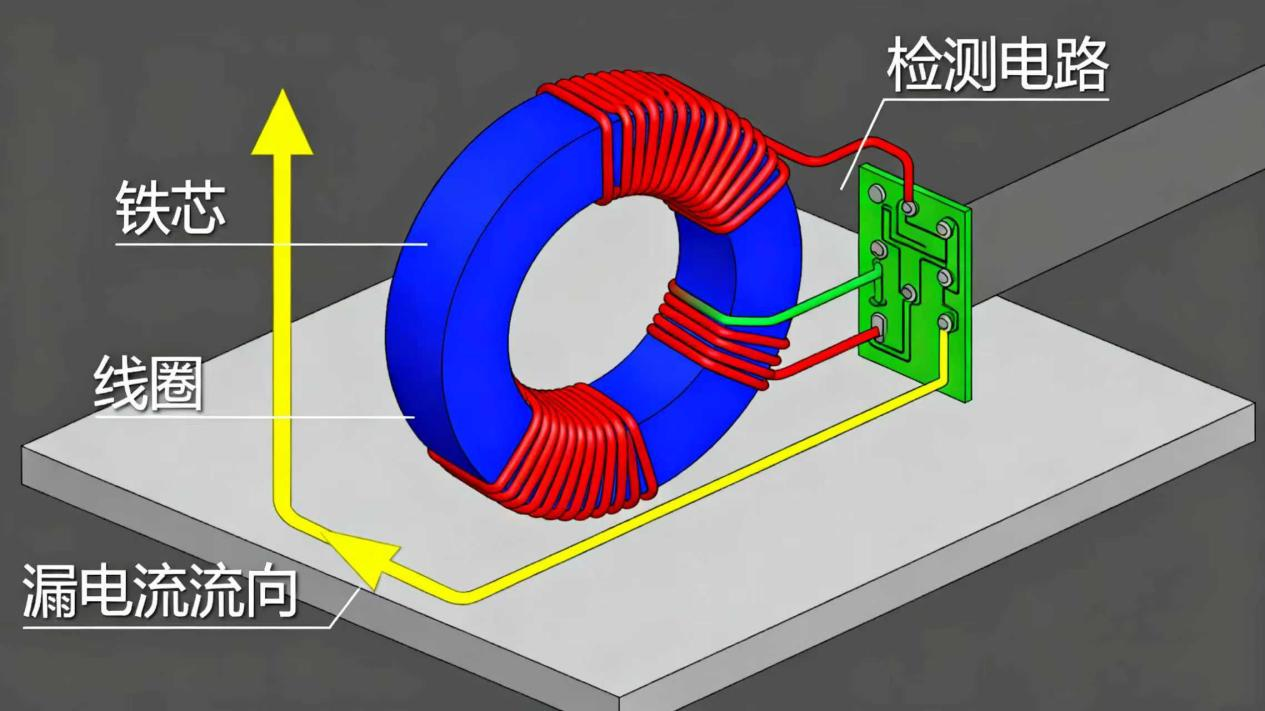
Основная структура чипа датчика Холла состоит из трех частей, которые вместе реализуют преобразование сигнала «магнит в электрический»:
①Элемент Холла: обычно изготавливается из полупроводниковых материалов, таких как кремний (Si) и арсенид галлия (GaAs), является основой генерации напряжения Холла;
② Схема формирования сигнала: интегральный усилитель, схема фильтра, схема температурной компенсации и т. д., используемые для усиления слабого напряжения Холла (обычно всего десятки мкВ) и компенсации влияния температурного дрейфа на точность;
③ Выходная цепь: в соответствии с требованиями приложения обработанный сигнал преобразуется в аналоговый выходной сигнал (например, линейное напряжение) или цифровой выходной сигнал (например, сигналы высокого и низкого уровня, импульсные сигналы).
в зависимости от типа выходного сигнала, метода обнаружения магнитного поля и назначения. Сферы применения различных типов существенно различаются:
| Измерение классификации | Конкретные типы | Основные характеристики | Типичные сценарии применения |
| Выходной сигнал | Аналоговые датчики Холла | Выходное напряжение линейно зависит от напряженности внешнего магнитного поля (чем сильнее магнитное поле, тем выше напряжение) и требует последующей выборки и обработки АЦП. | Измерение тока (например, мониторинг тока двигателя), определение напряженности магнитного поля |
| Цифровой датчик Холла | Выводит только высокие и низкие уровни (например, выводит низкий уровень, когда магнитное поле достигает порогового значения, в противном случае — высокий уровень), напрямую адаптируясь к микроконтроллеру | Определение положения (например, выключателя дверного замка), подсчет скорости (например, измерение скорости двигателя) | |
| Чувствительность к магнитному полю | Униполярные датчики Холла | Чувствительность только к магнитным полям в одном направлении (например, срабатывает «замкнут полюс N», полюс S неэффективен) | Одностороннее обнаружение положения (например, скорость вентилятора, ход кнопки) |
| Биполярные датчики Холла | Чувствительность к магнитным полям в обоих направлениях (срабатывание может происходить как при приближении/удалении северного полюса, так и при приближении/удалении южного полюса) | Двунаправленное обнаружение положения (например, определение направления вращения двигателя вперед и назад) | |
| Омниполярный датчик Холла | Чувствителен к магнитным полям любого направления (северный или южный полюс), различает только «магнитное поле» и «отсутствие магнитного поля». | Общие сценарии переключения (например, обнаружение переворота мобильного телефона) | |
| Функциональная интеграция | Линейные датчики Холла | Он аналогового типа, выходной сигнал линейно связан с магнитным полем и имеет высокую точность. | Высокоточное измерение тока и контроль напряженности магнитного поля |
| Тип переключателя Датчик Холла | Это цифровой тип. Когда магнитное поле достигает порогового значения, выходное состояние переключается. По сути, это «магнитный управляющий переключатель». | Обнаружение приближения, подсчет, блокировка положения | |
| Датчик Холла защелкивающего типа | Выходное состояние удерживается (блокируется) после срабатывания магнитного поля и требует обратного магнитного поля для сброса. | Измерение скорости двигателя и определение направления вращения |
При выборе микросхемы обратите внимание на следующие параметры, чтобы убедиться, что микросхема соответствует требованиям реального сценария применения:
1.Параметры, связанные с магнитным полем
① Диапазон рабочего магнитного поля (BOP/BRP):
Ключевым показателем аналоговых микросхем является отклонение фактического выходного напряжения от идеальной линейной характеристики (обычно выражаемое в процентах от полной шкалы, например, ±1% от полной шкалы). Чем выше линейность, тем выше точность измерения тока/магнитного поля.
2.Электрические параметры
① Диапазон рабочего напряжения (VCC):
Необходимо обеспечить соответствие напряжению питания системы (например, для системы микроконтроллера на 3,3 В выберите микросхему с питанием от 3,0 до 5,5 В; для автомобильной электроники выберите микросхему с широким диапазоном напряжений 4,5–24 В).
②Выходной ток (IOUT):
Для цифровых микросхем необходимо обращать внимание на максимальный ток стока/истока (например, 5 мА, чтобы обеспечить возможность управления GPIO микроконтроллера или оптопарой); для аналоговых микросхем необходимо обращать внимание на выходное сопротивление (обычно < 1 кОм, чтобы избежать затухания сигнала).
③Потребляемая мощность в состоянии покоя (IQ):
Ключевыми индикаторами являются сценарии с низким энергопотреблением (например, интеллектуальные устройства с питанием от аккумулятора). Выбор микросхем с энергопотреблением на уровне мкА (например, IQ < 10 мкА) необходим для предотвращения быстрого разряда аккумулятора.
3.Параметры окружающей среды и надежности
рабочих температур (TA):
Необходимо охватить диапазон температур применения (например, от -40 до 125 °C для промышленных сред, от -40 до 150 °C для автомобильных моторных отсеков и от 0 до 70 °C для потребительской электроники).
②Температурный дрейф (TC):
Относится к скорости изменения напряжения Холла/порогового магнитного поля в зависимости от температуры (например, ±0,1%/°C). Чем меньше температурный дрейф, тем выше стабильность микросхемы в широком диапазоне температур (приоритет следует отдавать микросхемам со встроенными схемами температурной компенсации).
③ Помехоустойчивость (ESD/EFT):
В промышленных/автомобильных средах следует уделять внимание уровням ESD (электростатического разряда) (например, HBM 8 кВ, CDM 5 кВ) и уровням EFT (быстрых электрических переходных процессов) (например, 4 кВ), чтобы предотвратить повреждение микросхем помехами.
4.Параметры упаковки и монтажа
упаковки :
Распространенные корпуса включают SOT-23 (миниатюрный, подходит для плотной компоновки печатных плат), TO-92 (для выводных отверстий, подходит для высокотемпературных сред) и DFN (безвыводной, подходит для сверхтонких устройств). Выбор следует основывать на требованиях к пространству для монтажа и теплоотводу печатной платы.
②Направление обнаружения :
Направление обнаружения магнитного поля элемента Холла делится на «в плоскости» (магнитное поле параллельно поверхности чипа) и «вертикальное» (магнитное поле перпендикулярно поверхности чипа), которое должно соответствовать фактическому направлению магнитного поля (например, обнаружение вала двигателя в основном осуществляется вертикально).
Процесс отбора должен следовать логике «уточнение требований → проверка параметров → проверка совместимости → оценка стоимости». Конкретные этапы следующие:
Шаг 1: Определите основные требования к приложению
Сначала определите «функциональные цели» чипа и ответьте на следующие вопросы:
Шаг 2: Фильтрация ключевых параметров в соответствии с требованиями
На основании требований шага 1 заблокируйте диапазон основных параметров:
Шаг 3: Проверка совместимости и надежности
Шаг 4: Оценка затрат и цепочки поставок
1. Игнорирование направления и силы магнитного поля: неспособность подтвердить фактическое направление магнитного поля (вертикальное/в плоскости) или силу (например, выбор микросхемы с BOP=1000 Гс, но фактическое магнитное поле составляет всего 500 Гс, в результате чего микросхема не срабатывает);
2. Игнорирование температурного дрейфа: выбор микросхемы без температурной компенсации в широком диапазоне температур (например, в промышленных условиях -40~125 ℃) приводит к значительному снижению точности выходных данных с ростом температуры;
3. Чрезмерная погоня за производительностью параметров: выбор микросхем автомобильного класса (например, сертифицированных по стандарту AEC-Q100) для потребительской электроники приводит к чрезмерно высоким затратам;
4. Шум источника питания не учитывается: аналоговые датчики Холла чувствительны к шуму источника питания и требуют подключения конденсатора емкостью 0,1 мкФ параллельно источнику питания микросхемы для фильтрации шума и предотвращения его влияния на точность выходного сигнала.
Ключ к выбору микросхемы датчика Холла — это «соответствие требованиям»: сначала определите функциональные, магнитные, электрические и экологические требования к конкретному варианту применения, затем тщательно проверьте ключевые параметры (такие как BOP, линейность и рабочая температура), а затем сделайте выбор, исходя из совместимости, стоимости и особенностей цепочки поставок. Будь то управление двигателем, измерение тока или определение положения, правильный выбор максимально увеличивает производительность датчика Холла и повышает надежность и стабильность всей электронной системы.